流程图
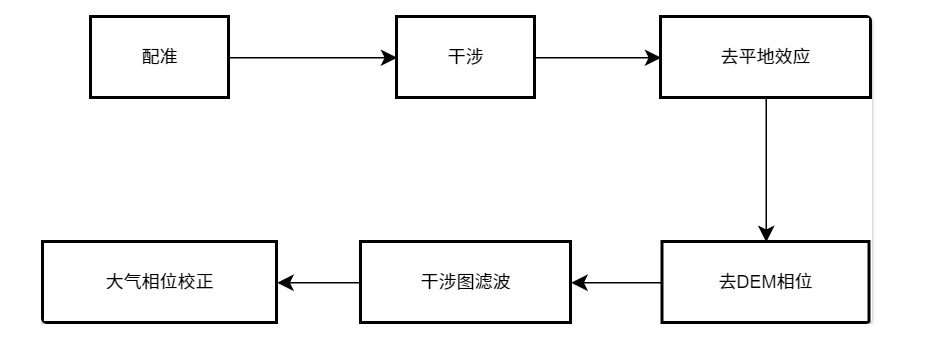
配准
强度图像金字塔
使用主辅图像的幅值构建影像金字塔,自顶向下逐层对图像进行匹配。1使得每轮匹配的搜索范围都相对较小,快速接近对应位置。代码中采用4层金字塔,上一层图像为下一层图像在距离向和方位向分别进行2倍下采样得到。匹配窗口为$21\times 21$、每层最大偏移为$15\times 15$、控制点数量为64。图像偏移量为控制点偏移量的均值。控制点匹配采用归一化相关匹配,使用相关性最高的偏移量为该控制点的偏移量。2
$$ R\left( x,y \right) =\frac{\sum_{x^\prime ,y^\prime }{M\left( x^\prime ,y^\prime \right) \cdot S\left( x+x^\prime ,y+y^\prime \right)}}{\sqrt{\sum_{x^\prime ,y^\prime }{M\left( x^\prime ,y^\prime \right) ^2}\cdot \sum_{x^\prime ,y^\prime}{S\left( x+x^\prime ,y+y^\prime \right) ^2}}} $$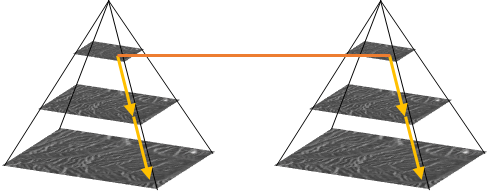
最大频谱法精匹配
使用最大频谱法对主辅图像进行匹配,使得主辅图像对齐到亚像元级别以满足后续处理需求。代码中采用的匹配窗口为$15\times 15$、最大偏移为$3\times 3$、控制点数量为64,计算前在图像距离向和方位向上分别进行5倍上采样。控制点偏移量使用最大频谱法得到的信噪比最大的偏移量。3
$$ u_{int}=u_m\cdot u_{s}^{*}=a_ma_s\cdot e^{j\left( \varphi _m-\varphi _s \right)} $$$$ SNR=\frac{f_{max}}{\sum{f_{i,j}}-f_{max}} $$图像偏移量使用控制点去除奇异值点和信噪比较低的点后,使用三阶多项式拟合。3
$$ \left\{ \begin{array}{l} \Delta x=a_0+a_1\cdot x+a_2\cdot y+a_3\cdot xy+a_4\cdot x^2+a_5\cdot y^2+a_6\cdot x^2y+a_7\cdot xy^2+a_8\cdot x^3+a_9\cdot y^3\\ \Delta y=b_0+b_1\cdot x+b_2\cdot y+b_3\cdot xy+b_4\cdot x^2+b_5\cdot y^2+b_6\cdot x^2y+b_7\cdot xy^2+b_8\cdot x^3+b_9\cdot y^3\\ \end{array} \right. $$插值
应用偏移量到辅图像上采用复数双线性插值
$$ f\left( x,y \right) =f\left( Q_{11} \right) w_{11}+f\left( Q_{21} \right) w_{21}+f\left( Q_{12} \right) w_{12}+f\left( Q_{22} \right) w_{22} $$$$ \left\{ \begin{align*} w_{11} &= \frac{(x_2-x)(y_2-y)}{(x_2-x_1)(y_2-y_1)}\\ w_{21} &= \frac{(x-x_1)(y_2-y)}{(x_2-x_1)(y_2-y_1)}\\ w_{12} &= \frac{(x_2-x)(y-y_1)}{(x_2-x_1)(y_2-y_1)}\\ w_{22} &= \frac{(x-x_1)(y-y_1)}{(x_2-x_1)(y_2-y_1)} \end{align*} \right. $$干涉
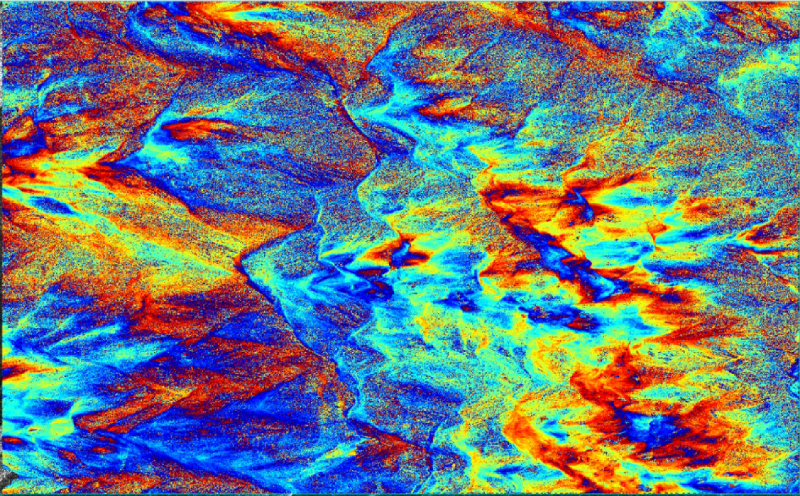
干涉图由主辅图像共轭相乘得到,相干图由干涉图用$9\times 9$窗口均值滤波并归一化得到。3
$$ \begin{align*} u_{int}&=u_m\cdot u_{s}^{*}=a_ma_s\cdot e^{j\left( \varphi _m-\varphi _s \right)}=a_{int}e^{j\varphi} \\ \varphi &=\varphi _\text{flat}+\varphi _\text{topo}+\varphi _\text{atm}+\varphi _\text{noise} \end{align*} $$$$ \gamma =\frac{|E\left[ M\cdot S^* \right] |}{\sqrt{E\left[\mid M\mid ^2 \right] E\left[\mid S\mid ^2 \right]}} $$去平地效应
斜距$R$和入射角$\theta$在SML文件中得到,使用线性插值对斜距$R$进行插值。$\Delta 𝑅$为当前像元与第一个像元斜距之差。 3 $R_0$为第一个像元的斜距,$R_{eq}$为干涉相位为0时对应的斜距。
$$ \varphi _\text{flat}=-\frac{4\pi}{\lambda}\cdot \frac{B_{\bot}\Delta \text{R}}{Rtan\left( \theta \right)}+\varphi _\text{const} $$$$ \varphi_\text{const}=-\frac{4\pi}{\lambda}\cdot \frac{B_{\bot}(R_{0}-R_{\text{eq}})}{R_{0}tan\left( \theta \right)} $$去平地效应后的干涉图相位:
$$ \begin{align*} \varphi _1& =\varphi +\frac{4\pi}{\lambda}\cdot \frac{B_{\bot}\Delta \text{R}}{Rtan\left( \theta \right)}\\ & =\varphi _\text{topo}+\varphi _\text{atm}+\varphi _\text{const}+\varphi _\text{noise}\\ \end{align*} $$去DEM相位
使用轨道数据将DEM数据逐点从WGS84坐标系转换到雷达距离-方位坐标系,使用线性插值将得到的数据插值到整个雷达距离-方位坐标系。通过高程相位的公式得到 3
$$ \varphi _\text{dem}=-\frac{4\pi}{\lambda}\cdot \frac{B_{\bot}\text{H}_\text{dem}}{R\sin \left( \theta \right)} $$去DEM相位后的干涉图相位:
$$ \begin{align*} \varphi _2& =\varphi _1-\varphi _\text{dem}\\ & =\varphi _\text{topo}-\varphi _\text{dem}+\varphi _\text{atm}+\varphi _\text{const}+\varphi _\text{noise}\\ & =-\frac{4\pi}{\lambda}\cdot \frac{B_{\bot}\Delta H}{R\sin \left( \theta \right)}+\varphi _\text{atm}+\varphi _\text{const}+\varphi _\text{noise} \quad\quad (\Delta H = H - H_\text{dem})\\ \end{align*} $$滤波
使用Goldstein滤波,将干涉图分成相互重叠的小块。对每个小块做傅里叶变换,得到其频谱$Z(u,v)$ , 用其对干涉图进行处理。$S[\cdot]$ 为平滑算子,使用$3\times 3$的均值滤波。Goldstein滤波窗口大小为$32\times 32$ , 步长为8 。45
$$ H(u,v) = S[ \lvert Z(u,v)\rvert ]^{1-\bar \gamma}\cdot Z(u,v) $$忽略残余噪声,滤波后干涉图相位:
$$ \varphi_3 = =-\frac{4\pi}{\lambda}\cdot \frac{B_{\bot}\Delta H}{R\sin \left( \theta \right)}+\varphi _\text{atm}+\varphi _\text{const}\\ $$大气相位校正
经过去平地效应和去DEM相位后,相位还剩余高频的相对高程相位与低频的大气相位和固定相位。对相位使用高通滤波器去除大气相位和固定相位。6 假设$E[\Delta H]=0$
$$ \varphi _3=k\Delta H+\varphi _\text{atm}+\varphi _\text{const} \quad\quad ( k=-\frac{4\pi B_{\bot}}{\lambda Rsin(\theta)}) $$去大气相位后的干涉图相位:
$$ \varphi _4=HPF( \varphi _3) =k\Delta H $$-
靳国旺. InSAR获取高精度DEM关键处理技术研究[D]. 解放军信息工程大学, 2007. ↩︎
-
OpenCV计算机视觉库. 模板匹配[EB/OL], (2025-7-3). https://docs.opencv.ac.cn/4.12.0/de/da9/tutorial_template_matching.html ↩︎
-
杨红磊, 彭军还, 康志忠. InSAR技术原理及实践[M]. 北京:科学出版社, 2021. ↩︎ ↩︎ ↩︎ ↩︎ ↩︎
-
BARAN I, STEWART M P, KAMPES B M, 等. A modification to the goldstein radar interferogram filter[J]. IEEE Transactions on Geoscience and Remote Sensing, 2003, 41(9): 2114-2118. ↩︎
-
Nome2s. InSARFilter[CP/OL], (2025-10-21). https://github.com/Nome2s/InSARFilter. ↩︎
-
FORNARO G, LOMBARDINI F, SERAFINO F. Three-dimensional multipass SAR focusing: experiments with long-term spaceborne data[J]. IEEE Transactions on Geoscience and Remote Sensing, 2005, 43(4): 702-714. ↩︎